如何才能驗證無人駕駛汽車在各種場景下是安全的?在虛擬世界里面創建虛擬的城市、虛擬的道路、虛擬的天氣、虛擬的汽車,讓虛擬的車在虛擬的城市里面跑,消除隱患,快速迭代,最終交付安全的自動駕駛系統。
本文選譯自達索系統SCANeR客戶見證日Frederic Bourcier,達索系統CATIA賽博系統團隊的研發副總裁和SIMULIA研發戰略規劃專家Stephane Tessier的演講。
Frederic 職業生涯的大部分時間都在汽車行業度過,有機會實際領導有關自動駕駛系統開發的重大項目和解決方案。Frederic在SCANeR客戶見證日介紹了達索系統在賽博系統(Cyber System)方面所做的工作,分享了AVSimulation和達索系統之間建立的合作伙伴關系的價值。
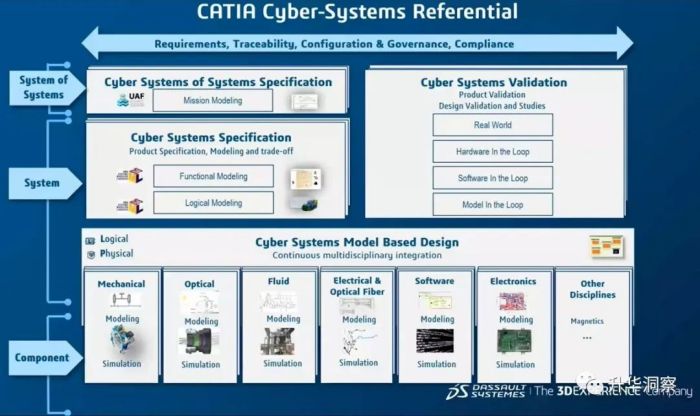
達索系統正在為賽博系統的開發提供一整套解決方案。這套解決方案涵蓋從系統規范到基于模型的設計,支持各工程學科的漸進式集成,并最終在開發結束時使用驗證解決方案進行驗證。整個過程都依賴于可追溯性能力來確保行業最強大的自動駕駛系統開發得到認證。
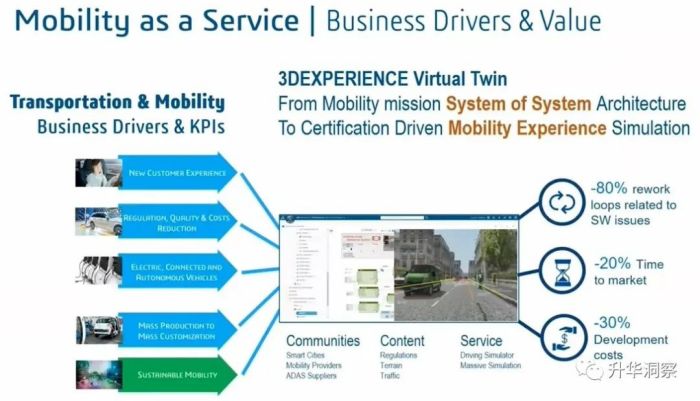
達索系統之所以提供賽博系統產品,是因為考慮到交通和出行正在經歷前所未有的轉變,受到經濟和社會因素的推動,這些因素需要重新定義,開發出互聯、自主、共享和電氣化的車輛.
車輛的設計已經從系統設計轉向系統之系統的設計,以提供卓越的出行體驗,目標是提供不斷增強的自動駕駛體驗能力。這個目標是我們在世界上看到的人類最艱難的挑戰之一。

[達索系統投資ADAS和自動駕駛]
這就是為什么達索系統決定投資并與AVSimulation公司合作,該公司正在解決這些新挑戰,這些挑戰正在成為系統之系統服務的一部分。
這家公司的工具就是SCANeR。可能很多自動駕駛的公司已經采用了這個工具,達索系統計劃用三維體驗平臺解決方案對它進行實際補充,以提供完全嚴格的工程開發解決方案、科學能力以及虛擬和真實驗證方法的組合,這將使開發成本成為負擔得起的成本。
為什么?因為開發自動駕駛解決方案的工程師們面臨的最大挑戰之一,就是自動駕駛系統在現實世界中運行時,需要證明自動駕駛系統安全性的能力。
為了做到這一點,能夠控制規劃并保持整個開發成本的可負擔性,我們必須依靠其他方式來進行系統驗證,而大規模仿真是我們必須實現的目標之一。即我們將能夠證明系統的可靠性和系統的穩健性,以及達到這一目標所必需的里程。
因此,達索系統的產品組合和CATIA SCANeR 的這種組合對于確保信息安全、功能安全和預期功能安全等多個方面的開發至關重要,車輛必須要通過嚴格的認證。通過進行這種組合,我們將能夠為這個更大的生態系統的各個利益相關者提供實現目標的可能性。

[從SCANeR到出行的三維體驗孿生]
很多公司已經是SCANeR的用戶,大家都知道SCANeR是模擬ADAS或自動駕駛系統的同類最佳解決方案之一。SCANeR 通過提供虛擬駕駛功能為行業提供幫助,它減少了用戶對駕駛驗證的需求,同時有助于實現傳感器和算法之間的并行開發活動。
為了有效地進行驗證并獲得用戶的認可,模擬環境必須對可能分布在多個利益相關者之間的多學科開發環境真實展現,并且該環境對于項目的成功至關重要,它必須具有可擴展性,需要解決跨多個國家和地理環境的諸多場景,橫跨數百萬英里,必須能夠展示自動駕駛及其穩健性。
與3DExperience平臺的集成,集成仿真體驗來管理三個方面,第一,模型的全生命周期,連同場景和結果的全生命周期,以及與達索系統產品配置相關的模擬環境的配置,一切都與規范的可追溯性一起完成。
第二是場景創建的自動化,這將增加健壯性,并將擴展滿足標準和法規標準所需的測試庫,以達到覆蓋將出現的新測試情況的能力。需要進一步管理一系列情況。
第三個事實是,我們將提供一種方法來利用虛擬和現實的混合,在開發生命周期中提供漸進式集成,并幫助用戶根據現實駕駛的結果來分析虛擬模擬。

[價值主張|自動駕駛的連續開發、集成、驗證和交付]
現在讓我們舉一個實際的例子,來看看CATIA SCANeR 是如何與達索系統的其余部分一起使用的。兩者的組合能夠提供開發全生命周期的完整連續性。
我們從出行任務的規范開始,然后創建將要被測試的自動駕駛系統,該系統將從其功能架構開始,然后通過一系列并行活動進行計算,包括定義模型、控制器的實現和開發、車輛的設計、傳感器,從這個階段開始,我們將使用CATIA SCANeR,以便能夠生成虛擬場景,構建測試,對目標系統進行大規模的虛擬仿真,并通過檢查真實環境中的測試與預期結果是否匹配,最終驗證并連接到現實,貫穿具備可追溯性的整個生命周期,以證明系統的安全性。安全性作為流程要求的合規性,并參與車輛的實際法規遵循,同時反饋到開發循環。大量的模擬和協助共同提供了一套解決方案,這些解決方案將為每位工程師提供參與這一旅程所需的能力。
由達索系統開發的行業流程一直代表著這個開發生命周期能夠提供的出行體驗,并且在開發的每個階段都部署了特定的角色來響應需求。

[價值主張| 1.定義出行任務]
工程師從定義出行任務的規格開始。這些需求以傳統方式進行編輯,但也可以導入正式規范,這有助于分析需求的具體含義和語義以檢查是否需求有不一致的情況,而且還能夠從一開始就啟動模擬以驗證為自動駕駛汽車定義的操作設計域被正確定義。

[價值主張| 2. 創建出行功能架構]
第二步是自動駕駛系統設計。該系統設計將完全在可追溯性功能下進行,以確保架構設計的需求和各種元素實際上與測試和驗證計劃相匹配。
這將依賴于使用sysML 語言與另一種解決方案CATIA Magic 一起作為,通過該工具提供的模擬功能進行第一級驗證。

[價值主張| 3.定義車輛場地模型]
在此之前,為了建立能夠測試控制器本身所必需的場地模型,我們依賴于與3DEXPERIENCE 平臺一起提供的多種角色,包括系統仿真設計師(System Simulation Designer)和系統仿真分析師(System Simulation Analyst),這兩個角色有助于運行場景并進行這些驗證。

[價值主張| 4. 定義和實現車輛控制器]
最終控制器的實現將根據汽車的標準規范來完成,包括基于AutoSAR的自適應解決方案,提供在軟件級別使用魔力軟件架構師(Magic Software Architect)角色來定義架構,并參與開發。在進行編譯之前,使用嵌入式軟件生產者(Embedded Software Producer)角色來保證軟件本身將在仿真環境中可用。
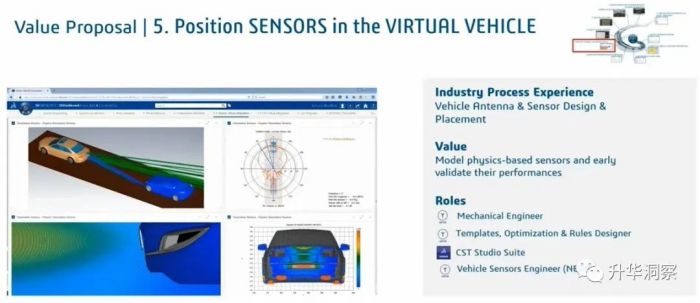
[價值主張| 5. 在虛擬車輛中置放傳感器]
結合車輛運行狀態,汽車本身的設計中,傳感器的位置對于自動駕駛任務的成功至關重要,因為視野傳感器、其他每個不同特征的傳感器,在理解場景時能夠將傳感和感知相結合,需要提供所需的魯棒性以滿足任務的安全要求。
為此,需要依靠設計整車的機械工程師角色,以及用于優化和設計規則的模板,以放置和定位傳感器,以及了解如何通過CST 提供傳感器電磁模擬,也就是說,將雷達波和雷達的傳感能力作為傳感器和車輛傳感器的一部分進行模擬,工程師將能夠完成對系統整體傳感和感知的理解。這些角色適用于各種類型的傳感器,從相機到激光雷達,再到其他傳感器。

[價值主張| 6. 定義場景元素:地形、道路、路標、建筑物]
是時候進入自動駕駛系統在其環境中模擬的時刻了,系統將揭示它是否能夠滿足我們的需求,以在環境中表現得真實的時刻,我們確實依賴于3DEXPERIENCE 平臺的功能,使AVSimulations 和CATIA SCANeR 協同工作。駕駛體驗工程師(Driving Experience Engineer)將成為能夠通過首先定義場景元素來提供這種體驗的單元,包括地形、道路、道路標志和建筑物依賴于系統中的現成場景,也能夠擴展到其他感興趣的任何類型的場景環境,根據用戶需求,必須實現的目標來證明自動駕駛系統的安全性。
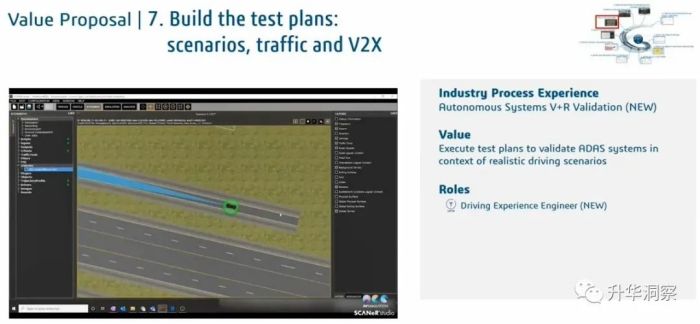
[價值主張| 7. 構建測試計劃:場景、交通和V2X]
下一步將是構建測試計劃,包括與環境和V2X 交互的可能性,以及一般駕駛體驗。能夠完成這些場景以解決更復雜的功能、擴展到系統之系統,測試車輛與環境之間的關系。為此,我們依賴CATIA SCANeR,它將能夠為用戶提供這種體驗并運行這種場景。
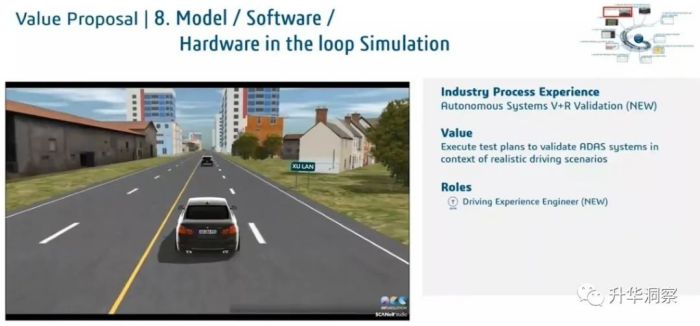
[價值主張|8. 模型在環/ 軟件在環/ 硬件在環仿真]
最后,隨著CATIA SCANeR 仿真的推出,模擬和運行硬件在環仿真的時刻到來了,平臺中的仿真將執行測試計劃,并有助于在駕駛場景的背景下驗證ADAS 系統之前的設置。

[價值主張|9.大規模模擬探索多種場景替代方案]
到了證明自動駕駛安全性的時候,要考慮的場景不限于此,還需要考慮負載均衡能力,才能跑海量的模擬,跑幾百萬次的算力來證明自動駕駛級別所需的安全確定性。虛擬駕駛測試工程師(Virtual Driving Test Engineer)角色將被提議用于解決大規模模擬問題,并探索能夠證明安全性的多種場景替代方案。
上面已經介紹了開發自動駕駛系統的幾個步驟,從設計到實施,到測試的澄清和測試的執行,我們向行業提供的承諾是提供全面的連續性。但這種連續性只有在我們能夠實際獲取實時運行數據并使用單一事實來源將數據從應用程序傳送到應用程序時才有效,而這正是我們開發和集成CATIA SCANeR 與3DEXPERIENCE 平臺的方式。你會在下面的視頻中看到,團隊已經能夠在3DEXPERIENCE平臺的上下文中使用CATIA SCANeR 生成的數據,在3DEXPERIENCE 平臺中重放并探知實時運行數據的每個方面,從集成的三個方面到場景再到結果,以使其可供分析。接下來請觀看將CATIA SCANeR 與3DEXPERIENCE平臺集成的短視頻演示。

該視頻演示了在CATIA系統工程控制構建(Control Build)應用程序中描述的自動緊急制動系統,然后通過具備ADAS仿真的SCANeR Studio進行仿真,并在三維體驗平臺上回放仿真結果。CATIA 系統控制構建應用程序允許構建和設計這個由不同組件構成的緊急制動系統,用于感知、決策和驅動。
這個系統讓我們可以從中檢查輸入和輸出變量,可以作為聯合仿真的FMU(功能模型單元)導出。
現在FMU 文件已打開到SCANeR studio,您可以檢查它并管理FMU 輸入和輸出以及與SCANeR 源之間的映射。在SCANeR studio 中打開感興趣的場景時,我們只需將這個FMU 添加到場景中即可。此版本已準備好運行。第一輛車在前面行駛,在第二個位置是一個皮卡,我們可以添加一輛寶馬作為被測車輛,第一輛粗暴地停車,第二位置的皮卡車會突然變道,然后被測車輛發現停下的第一輛車。在SCANeR 中分析這種情況的結果。在這種情況下,測試失敗,發生了碰撞。為了保存和檢查結果進行分析,SCANeR 用戶決定連接到3DExperience 平臺,第一次需要登陸賬號信息,SCANeR 分析創建場景,相關結果則保存在三維體驗平臺上。
作為一個MSR仿真項目,MSR(Model-Scenario-Result)代表模型、場景、結果,當用戶現在訪問3D 儀表板時,也就是在三維體驗平臺上的Web 門戶時,他可以立即訪問SCANeR 模擬及其狀態,以及其他3DEXPERIENCE平臺上的信息,以便快速查看和輕松協作。現在可以在Web 3D 查看器中重放SCANeR 模擬結果,顯示感興趣的KPI,繪制3D 動畫,其中有多個攝像機設置,允許在重放期間修改視角。

[價值主張| 10. 分析模擬結果并評估合規性]
最后,我們價值主張的第10 步將返回到3DExperience 平臺,在該平臺上可以分析模擬結果并評估對內部目標的遵守情況。
現在用到的角色是多學科優化工程師(Multi Disciplinary Optimization Engineer),他從大規模模擬中收集結果,并幫助推動分析并確定哪些是最佳場景,哪些可能用于傳感器優化,哪些是有助于實現設定目標的角色和操作。這里提供了3DEXPERIENCE 平臺和CATIA賽博系統組合以及AVSimulation CATIA SCANeR 的組合,我們相信這是一個市場上獨特的價值方案,通過組合來提供所有必要的步驟,以便能夠設計和證明自動駕駛系統以及駕駛員輔助系統的能力。




 明基投影機
明基投影機 堅果投影機
堅果投影機 科視投影機
科視投影機 極米投影機
極米投影機 SONNOC投影機
SONNOC投影機 寶視來投影機
寶視來投影機 視美樂投影機
視美樂投影機 當貝投影機
當貝投影機 哈趣投影機
哈趣投影機 WAP手機版
WAP手機版 建議反饋
建議反饋 官方微博
官方微博 微信掃一掃
微信掃一掃